视觉引导机械手抓取汽车门框用3D定位架子的XY和角度还有门板的高度,用2D视觉系统定位门板的抓取位置,引导机械臂抓取工程车门板。
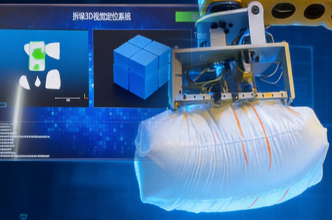
视觉引导机器人系统:引导机器人准确抓取并到达指定位置以指定姿态进行装配用机械手实现抓取、转运、装配。配重块位置不固定,堆叠状态随机。 单生产节拍要求在10秒以内,流水线为多台机器人并行工作。 装配流水线有固定节拍。
通过机器人3D定位系统引导机器人用吸盘,实现无人化、自动化生产。通过3D视觉方案实现三维扫描定位。 选用兼容对应视野的产品型号。 优化识别速度和机器人路径,实现<10s生产节拍。 通过算法实现一次扫描提供多个位置坐标,保证流水线固定节拍。
电话:180 9240 7187 (同微信) 在线QQ:2812496259
地址:陕西省西安市高新区丈八一路汇鑫中心C座1505室 (苏州)昆山市工业技术研究院祖冲之路1699号3号楼三楼 (东莞)松山湖高新区工业东路6号固高科技园 (深圳)龙华区观澜街道黎光社区黎光新工业区18号五楼 Copyright@2006-2018 海克易邦光电科技有限公司陕ICP备16001484号----整套机器视觉系统提供商 保留所有版权