食品罐在装运前必须要进行检测,以确保它们的盖子上印有有效期代码、罐体上贴有正确的标签且具有防伪印章。
过去,食品罐的检测是由人工手动完成的。这是一个容易出现人为错误的耗时且昂贵的过程。为了降低手工检测的成本并提高效率,海克易邦专门为食品罐产品检测开发了一套基于视觉的自动化系统。
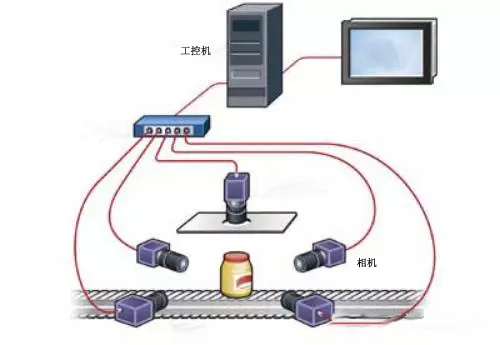
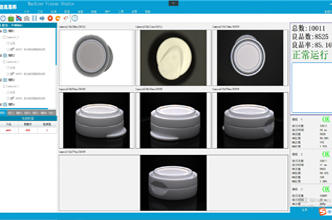
在实际检测过程中,装有特定食品的食品罐通过传送带被输送到该视觉系统中。一旦食品罐进入该视觉系统,光反射传感器即被触发。随后,安装在传送带上的编码器,开始跟踪食品罐的位置信息,直到食品罐到达系统中的一个最佳位置。在这个最佳位置处,五台相机被触发,用于捕获食品罐外部的360°视图以及食品罐盖子的图像(见图1)。
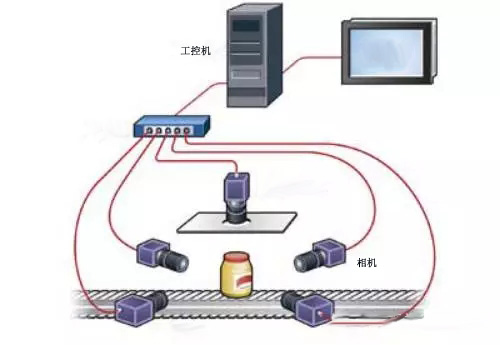
图1:装有农产品的食品罐在传送带上移动时,四台相机用于捕获食品罐侧面的图像,以检测是否遗漏标签和防伪印章。另外一台相机用于检测盖子上是否印有日期代码。
该系统中使用了五台相机,其中四台安装在X/Y平面,距离食品罐300mm,用于捕获食品罐侧面的四幅图像。每台相机都装有偏振滤光片,以确保白光LED发射的光,不会使直接面对它的相机中的成像器饱和。
第五台垂直安装的相机用于捕获食品罐顶部的图像。这台相机的镜头是借助在一块不透明硬质塑料板上切割出一个小孔安装的,以此提供穹顶灯的一种廉价替代方案。位于x/y平面中的四个LED发出的光,被该塑料板反射,从而能以一种均匀扩散的方式为食品罐顶部提供足够的照明。
一旦系统被触发,相机开始捕获数据,将这些数据传送给PC,PC中的视觉检测软件将处理这五幅图像。
软件解决方案
在实际检测过程中,软件组件计算食品罐在传送带上的位置、触发相机捕获食品罐的图像,并且计算是否发现有缺陷的食品罐。如果发现了有缺陷的食品罐,则将启动气动剔除系统,将有缺陷的食品罐从检测线中移走。
气动剔除
在视觉系统软件已经检验到一个食品罐是否具有日期代码、标签或防伪印章后,来自这三个检验过程的结果,将被系统软件的另一个组件所记录。如果这三个检验项目中有一个缺失,系统软件将利用来自光电反射传感器和编码器的数据,确定何时应该触发气动喷嘴,在不合格的食品罐离开视觉检验区域后从传送带上剔除。
如果视觉系统被触发,并且该软件未能在相机捕获的图像中找到任何产品,系统将自动启动剔除程序,认为检验到了一个不合格的产品。
为了确保没有错误的产品运送给客户,本系统采用了第二个光电反射传感器。如果一个被视觉系统确定为要剔除的食品罐继续在传送带上向下输送,这个光电反射传感器将被触发。这时,系统会向操作员发出警报,以提示需要人工干预,从生产线上剔除不合格的产品。
|